
سلام دوستان عزیز هم رویشی. به این صفحه از آموزش خوش آمدید! مدت زمان آموزش ساخت بازوی رباتیک با آردوینو 3 ساعت و 30 دقیقه است. این آموزش در ادامهی آموزش آردوینو از صفر (+) تولید و منتشر شده است. این دوره کاملا پروژه محور و اولین آموزش ساخت ربات بعد از دوره آموزش آردوینو از صفر است.
در این دوره آموزشی سعی شده است از مطالبی که در دوره، آموزش آردوینو از صفر فرا گرفته شده برای ساخت این بازوی رباتیک استفاده گردد.
در حال حاضر علم رباتیک در دنیا بسیار پرطرفدار شده و در اکثر مدارس هم از کیت های رباتیک برای آموزش کودکان استفاده میشود. امروزه علم رباتیک در حوزههای مختلفی استفاده میشود و همچنین در رباتهایی که ساخته میشود از هوش مصنوعی هم نیز استفاده می گردد. این امر سبب شده هست که این حوزه نسبت به قبل بسیار جذابتر شود.
در این دوره سعی شده نحوه ساخت یک بازوی رباتیک که بسیار پرکاربرد است را به شما آموزش دهیم.
موضوع آموزش :
دوستان عزیز همان گونه که در قسمت بالا اشاره شد امروزه بازوهای رباتیک بسیار پرکابرد و درحال ترکیب شدن با هوش مصنوعی نیز هستند که در آینده و در مسیر رباتیک حتما از هوش مصنوعی نیز استفاده خواهیم کرد. حوزههای کاری بازوی رباتیک بسیار زیاد است ولی بیشتر در حوزههایی مثل صنعت خودروسازی، حوزه پزشکی و در حوزه انبارداری از این بازوهای رباتیک استفاده میشود.

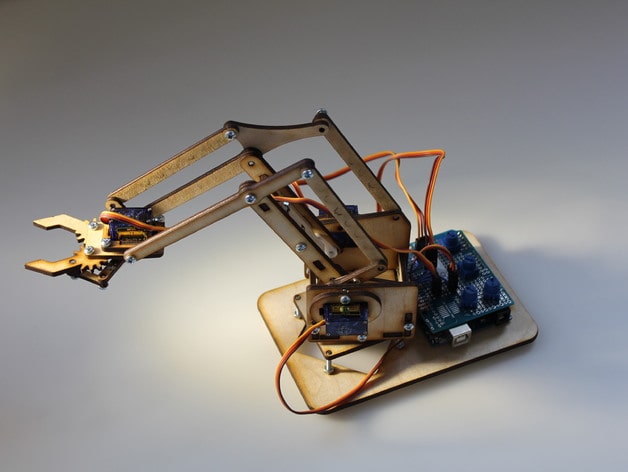
ما در این آموزش، بازوی رباتیکی که خواهیم ساخت یک حالت مینیاتوری از لحاظ اندازه نسبت به این بازوهای رباتیک واقعی دارد. شما بعد از مشاهده آموزش قادر خواهید بود بازوی رباتیک خود را شخصی سازی کرده و آن را توسعه دهید.
** اگر دوست دارید راجع به بازوهای رباتیک بیشتر بدانید بر روی این لینک (+) کلیک کنید یا فیلم زیر را مشاهده کنید:
+ مطالعه متن فیلم بالا در لینک زیر:
بازوی رباتیک چیست؟ — انواع بازوهای رباتیک (مکانیکی)
این آموزش در یک نگاه:
در این آموزش ما طبق آموزش آردوینو از صفر (+) از برد مدل UNO استفاده میکنیم. شاسی و بدنه این ربات و همچنین پیچ مهرههای این بازوی رباتیک به شما معرفی می گردد. شما میتوانید به راحتی آنها را تهیه کنید.
در این آموزش برای راحتی اسمبل از شماره گذاری قطعات استفاده میکنیم که موقع اسمبل دچار سختی و اشتباه نشوید. این بازوی رباتیک شامل 4 عدد سروو موتور است. در واقع میتوان با این 4 عدد سروو موتور، بدنه ربات را به طور کامل کنترل کرد.
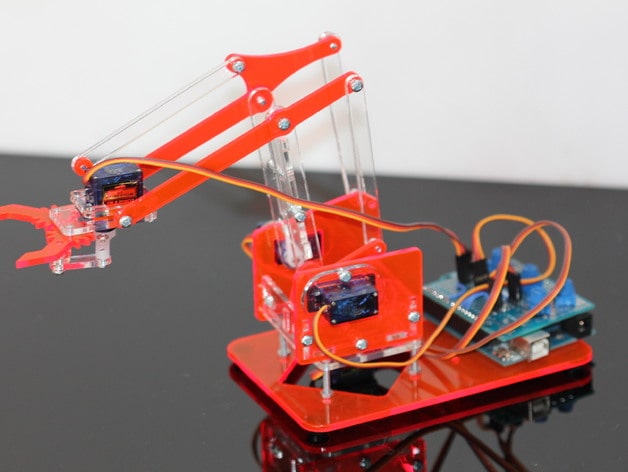
این سروو موتورها زوایه تغییر 0 تا 180 دارند و می توان از طریق کد این سروو موتورها را کنترل کرد. ولی در این آموزش ما به طور دستی و با پتانسیومتر نیز سروو موتورها را کنترل خواهیم کرد.
هنگام اسبمل کردن بدنه ربات با شماره قطعات جلو خواهیم رفت. مرحله به مرحله به هنگام اسمبل از طریق وبکم و فایل راهنما نحوه اسمبل به شما توضیح داده خواهد شد. در این آموزش سرورو موتورها را هم از طریق کد و هم از طریق پتانسیومتر کنترل خواهیم کرد.
در نهایت برای کنترل بازوی رباتیک از پتانسیومتر استفاده میکنیم. همچنین مدار نهایی این بازوی رباتیک را با نرم افزار Fritzing طراحی میکنیم. در انتها نیز کد بازوی رباتیک را مرحله به مرحله خواهیم نوشت.
این آموزش بی نظیر است زیرا:
- کاملا پروژه محور است.
کلیدواژگان
ساخت بازوی رباتیک با آردوینو | ساخت بازوهای رباتیک | فیلم آموزش ساخت بازوی رباتیک | کلیپ آموزش ساخت بازوی رباتیک | فیلم آموزشی ساخت بازوی رباتیک | دانلود فیلم آموزش ساخت بازوی رباتیک | طراحی بازوی رباتیک









نقد و بررسیها
هنوز بررسیای ثبت نشده است.